To be filled as design is finalized
Main Design
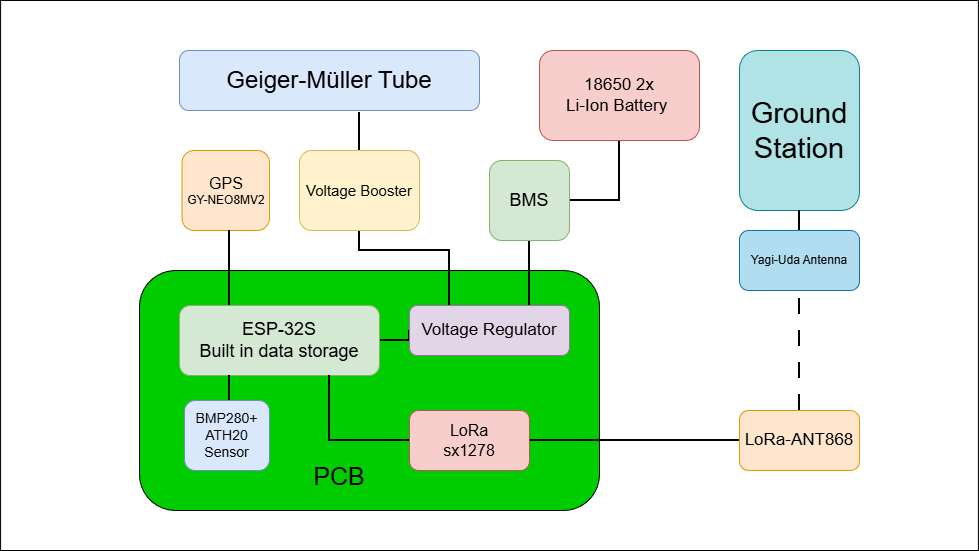
The primary mission’s requirements will be satisfied with the well established BMP280 combined temperature and barometric pressure sensor connected using the I2C bus. All this will be controlled with an ESP32 microcontroller.
Communication between the ground station and the CanSat will be handled by two SX1262 LoRa modules.
Power will be supplied by an 18650 LiIon cell through a simple off the shelf BMS board to ensure the safety standards required when working with lithium based battery technology.
Secondary Mission
The Kaboom CanSat team’s secondary mission is comparing radiaoctive radiation between ground level and the approximate height of 1 km.
Measuring will be done with a semi-homemade Geiger-Muller counter made from an SBM 20 Soviet-era Geiger-Muller tube and a 400V power supply extracted from an electric fly swatter.